Engineering 58 Pade Approximations, Aron Dobos, 26 February 2005
Contents
First order Padé approximation step response with MATLAB (Td = 1).
sys1st = tf([-1 2], [1 2]);
Second order transfer function.
sys2nd = tf([1 -6 12], [1 6 12]);
Inverse Laplace transforms of the step responses.
syms s;
pretty( ilaplace( (-s+2)/(s*(s+2)) ) )
pretty( ilaplace( (s^2-6*s+12)/(s*(s^2+6*s+12)) ) )
1 - 2 exp(-2 t)
1/2 1/2
1 - 4 3 exp(-3 t) sin(3 t)
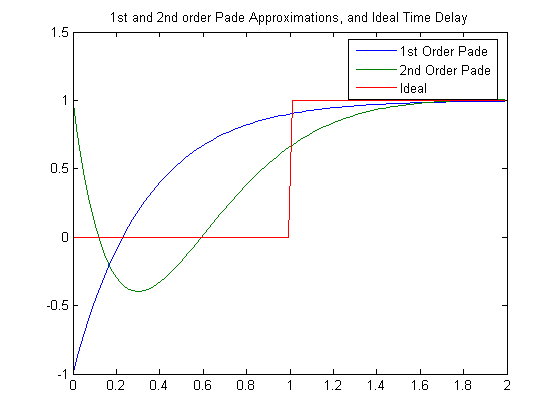
Plotting the responses
[y1 t] = step(sys1st);
[y2 t] = step(sys2nd);
y3 = heaviside(t-1);
plot(t, y1, t, y2, t, y3);
title('1st and 2nd order Pade Approximations, and Ideal Time Delay');
legend('1st Order Pade', '2nd Order Pade', 'Ideal');
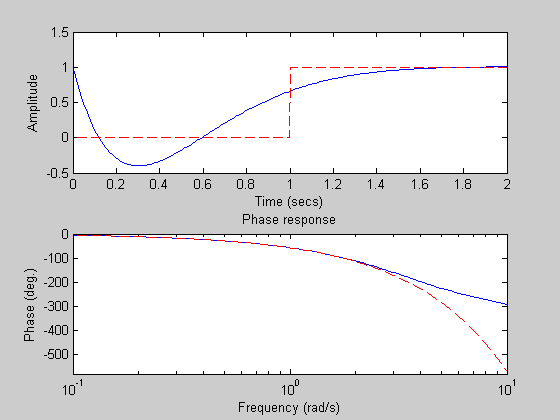
Checking the 2nd order response with the MATLAB 'pade' command
pade(1,2);
Step response of 2nd-order Pade approximation
System with a time delay using the Pade approximation
T = tf([-1 2], [ 1 7 14 8]);
figure;
rlocus(T);
legend hide;
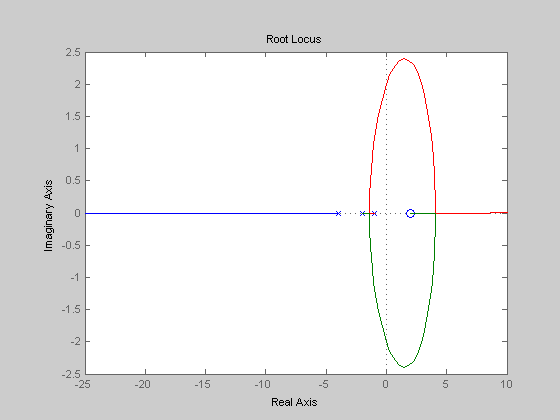
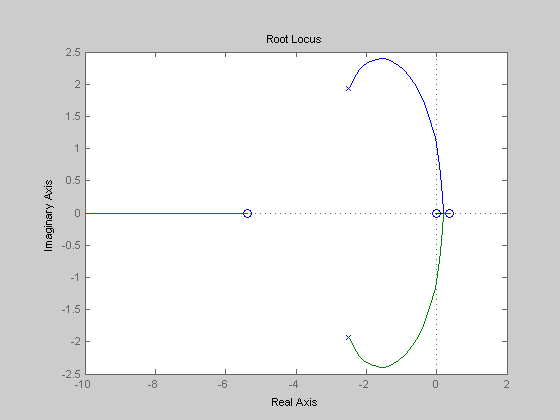
Root locus as T_d varies given K=6 using a 1st order Pade approx.
T = tf([1 5 -2 0], [2 10 20])
rlocus(T);
Transfer function:
s^3 + 5 s^2 - 2 s
-----------------
2 s^2 + 10 s + 20
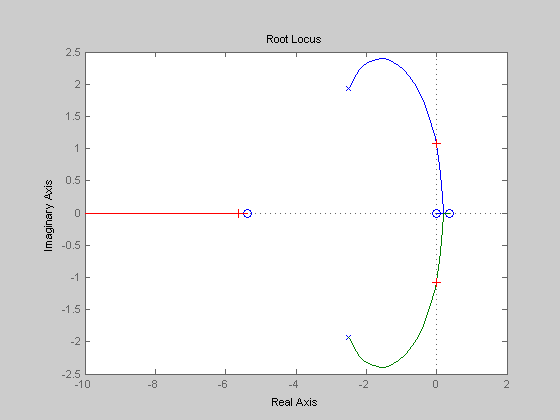
Find a positive T_d for which the system becomes unstable
T_d = rlocfind(T)
Select a point in the graphics window
selected_point =
-0.0047 + 1.0792i
T_d =
3.0579
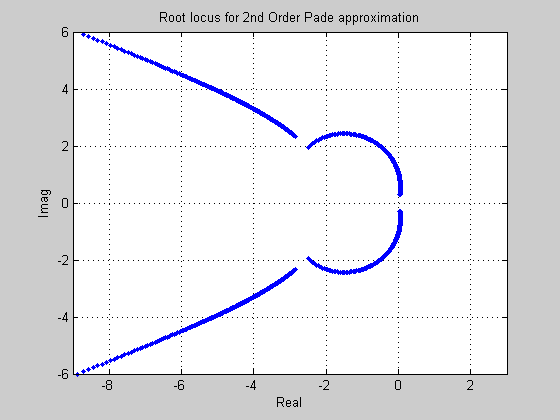
Producing a root locus as T_d varies with a 2nd order Pade Approx.
Start = 0;
End = 10;
Step = 0.01;
Threshold = 0.002;
Tdvec=Start:Step:End;
AllRoots = [];
Tdvals = [];
K = 1;
N = 1;
for I=1:length(Tdvec)
T_d = Tdvec(I);
CharEqn = [T_d^2 (6*T_d + 5*T_d^2) (12 + 30*T_d + 10*T_d^2) (60-12*T_d) 120];
R = roots(CharEqn);
for J=1:length(R)
AllRoots(K) = R(J);
K = K+1;
end
I = find(real(R)<Threshold & real(R)>-Threshold);
if (length(I) > 0)
Tdvals(N) = T_d;
N=N+1;
end
end
plot(real(AllRoots), imag(AllRoots), '.');
axis([-9 3 -6 6]);
grid;
xlabel('Real');
ylabel('Imag');
title('Root locus for 2nd Order Pade approximation');
disp('Created root locus.');
disp('Marginally stable values of T_d');
Tdvals
Created root locus.
Marginally stable values of T_d
Tdvals =
2.0000 2.0100 2.0200 2.0300 2.0400
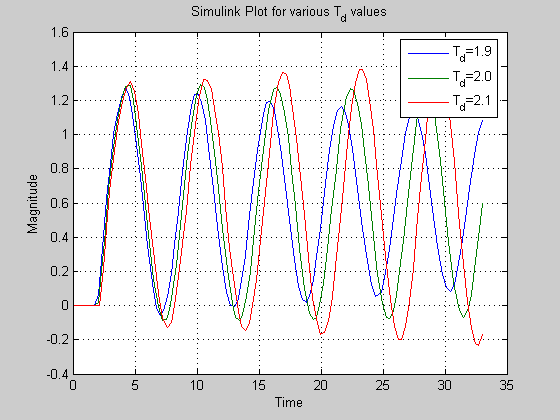
Using SIMULINK to find T_d that causes the system to become unstable
sim_Td=1.9; sim('parte', 33); time1 = simout.time; tdval1 = simout.signals.values;
sim_Td=2.0; sim('parte', 33); time2 = simout.time; tdval2 = simout.signals.values;
sim_Td=2.1; sim('parte', 33); time3 = simout.time; tdval3 = simout.signals.values;
plot(time1, tdval1, time2, tdval2, time3, tdval3);
title('Simulink Plot for various T_d values');
xlabel('Time'); ylabel('Magnitude'); grid;
legend('T_d=1.9', 'T_d=2.0', 'T_d=2.1')
Warning: Using a default value of 0.66 for maximum step size. The simulation step size will be limited to be less than this value.
Warning: Using a default value of 0.66 for maximum step size. The simulation step size will be limited to be less than this value.
Warning: Using a default value of 0.66 for maximum step size. The simulation step size will be limited to be less than this value.