Engineering
58 Exam 2 Takehome
Aron
Dobos
12
Apr 2005
Problem
4
a) i.
Bode plots for 1st and 2nd order Pade approximations and ideal time delay. (Td=1).
>>
P1 = tf([-1
2],[1 2])
Transfer
function:
-s
+ 2
------
s +
2
>>
P2 = tf([1
-6 12], [ 1 6 12])
Transfer
function:
s^2
- 6 s + 12
--------------
s^2
+ 6 s + 12
>>
Id = tf([1],[1],'inputdelay',1)
Transfer
function:
exp(-1*s) * 1
>>
bode(P1,P2,Id)
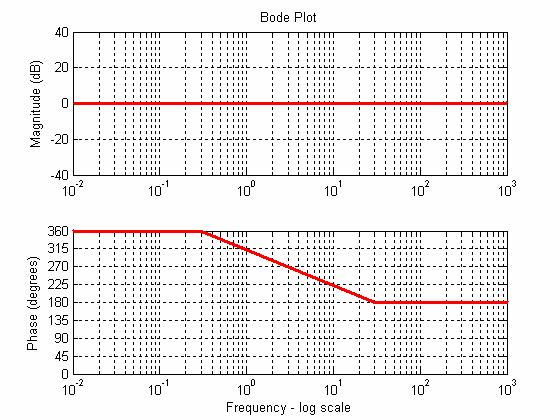
Figure 1. 1st and 2nd
Order Pade Approx. (Td=1), Ideal Time
Delay
The
discrete discontinuities on the magnitude plot are on the order of 10-15,
so it is safe to assume that the magnitude is just 0 dB.
ii.
Revised rules for asymptotic bode plots.
Since
the ideal time delay does not change the magnitude of the
bode plot, the magnitude rule for plotting a Pade
approximation is to leave the original magnitude unchanged. Improvised rules for approximate plotting of
the phase of the nth Pade approximation
are given.
The
following MATLAB program gives the frequency response of 1 to 3 second time
delays for each of the first six Pade
approximations. The ‘pade’
clear figure;
hold on;
for td=1:3
for n=1:6
[num den] = pade(td,
n);
disp(sprintf('Order %d Pade approximation (Td=%d)\n', n, td));
T = tf(num,den)
roots(num)
roots(den)
bode(T)
end
end
hold off;
Figure 2. Phase of 1à6 Order Pade
Approx. with Td= 1à3 s
From
this graph, we can see that the low frequency asymptote increases by 360
degrees for each increase of two orders of the Pade
approximation. The high frequency
asymptote is always 180 degrees or 0 degrees, depending on whether the order of
the approximation is even or odd. An
increase in the time delay shifts the phase to the left. Looking at the 1st order
approximation shown in Figure 1 for Td=1, the center frequency w0
seems to be at 2 rad/sec, which would make sense
given the original Bode plot rules, if the 1st order Pade approximation transfer function is written in the
appropriate form given below:
Therefore
it is assumed for lack of better insight that the center frequency, the
approximate inflection point of the Pade phase curve,
is used to plot the asymptotic phase approximation for the Pade
approximation is this w0.
The
3rd order Pade approximation (Td=1)
is
![]()
The
roots of the numerator are the negative of the denominator roots, and are given
below.
3.6778 + 3.5088i
3.6778 - 3.5088i
4.6444
The
denominator polynomial can be written as
![]()
For
the 2nd order complex pole the natural frequency and damping ratio
are
![]()
Using
the asymptotic phase equations for a standard 2nd order pole, we
plot a line from the low frequency asymptote to the high frequency asymptote
starting at
 rad/sec
rad/sec
to
 rad/sec.
rad/sec.
Looking
at the phase plot for the actual 3rd order Pade
approximation, these frequencies appear appropriate for the starting and ending
points of the connecting line. The
frequency of the real root at s=4.6444 is about at the center of the
curve.
The
phase plot of the 3rd order Pade
approximation is given below.
Figure 3. P3(s)
Phase diagram.
The
denominator of nth order Pade
approximation for n > 2 and n is odd can always be written factored into the
form
![]()
since there is always a real pole.
The zeros of the numerator are the negated zeros of denominator
polynomial. From the discussion of the 3rd order approximation, we
decided to use the value of the real pole as the ‘center’ frequency of the
inflection point. For lack of a better
idea, this is the frequency we will use.
For
an even order Pade approximation, simply choose one
of the natural frequencies I suppose.
In
summary, the updated asymptotic bode plot rules for an nth order Pade approximation are:
|
|
Magnitude |
Phase |
|
Pade(n, Td) |
0
dB |
1.
Low frequency asymptote at 2.
High frequency asymptote at 3.
Connect from |


We
can also write the rules so that the phase always starts at 0 degrees, since
adding 360 does not change the actual response. In this case the Bode plot rules are given
by:
|
|
Magnitude |
Phase |
|
Pade(n, Td) |
0
dB |
1.
Low frequency asymptote at 2.
High frequency asymptote at 3.
Connect from |
 iii. Using these rules from the first table,
the Bode plot for the 1st order Pade
approximation is shown below.
iii. Using these rules from the first table,
the Bode plot for the 1st order Pade
approximation is shown below.
Figure 4. Asymptotic Plot of 1st
Order Pade Approx. (Td=1)
This
plot compares reasonably favorably with the MATLAB generated phase plot for the
1st order Pade approximation.
b) Determine the time delay to make the system
marginally stable using Nyquist or Bode plot. The uncompensated system is shown below.
Figure 5. Uncompensated
system margins.
>>
Gp = tf([6],poly([-1 -4]))
Transfer
function:
6
-------------
s^2
+ 5 s + 4
>>
margin(Gp)
i.
For the 1st Order Pade Approx.
To
find the time delay required to make the system marginally stable, we iterate
through time delays, and stop as soon as the closed loop transfer function has
roots on the jw axis.
The MATLAB code to do this for the first order Pade
approximation is given below.
function [Td, Wn] = pade1unstable(start, granularity, final)
Gp = tf([6],poly([-1 -4]));
for Td = start:granularity:final
T = feedback(Gp*tf([-Td 2],[Td 2]),1);
[num, den] = tfdata(T,
'v');
rden
= roots(den);
R = find(real(rden) > 0);
if
(length(R)>0)
Wn = imag(rden(R(1)));
return;
end
end
Guessing
that the required time delay was approximately 1.5 seconds or more, the
function is called with a Td step size of 0.0001. The natural frequency of the oscillation is
returned also.
>>
[T w] = pade1unstable(3.2,.00001,3.3)
T =
3.2209
w =
1.0510
ii.
For the 2nd Order Pade Approx.
We
use the same methodology for the 2nd order approximation. The MATLAB code is given below.
function [Td, Wn] = pade2unstable(start, granularity, final)
Gp = tf([6],poly([-1 -4]));
for Td = start:granularity:final
T = feedback(Gp*tf([Td^2 -6*Td 12],[Td^2 6*Td
12]),1);
[num, den] = tfdata(T,
'v');
rden
= roots(den);
R = find(real(rden) > 0);
if
(length(R)>0)
Wn = imag(rden(R(1)));
return;
end
end
>>
[T w]=pade2unstable(2, 0.00001, 2.2)
T =
2.0159
w =
1.0510
Note
that the oscillation frequency for the marginally stable case is the same as
with the 1st order Pade
approximation. This makes sense since
the magnitude is unchanged, only the phase, so the crossover frequency does not
change.
iii.
For the ideal time delay.
The
phase of an ideal time delay is ![]() . Since the phase
margin is 119 degrees, we wish to decrease the phase by 119 degrees at the
crossover frequency so that the system gain is 1 with -180 degrees phase
angle. The ideal delay does not affect
the magnitude, so the crossover frequency does not change, and is 1.05 radians
(read from the bode plot).
. Since the phase
margin is 119 degrees, we wish to decrease the phase by 119 degrees at the
crossover frequency so that the system gain is 1 with -180 degrees phase
angle. The ideal delay does not affect
the magnitude, so the crossover frequency does not change, and is 1.05 radians
(read from the bode plot).
Solving
the equation ![]() , we get
, we get ![]() .
.
c)
Oscillation frequencies for the marginally stable systems.
The
oscillation frequency for each of the systems is at the crossover frequency
because neither the Pade approximations nor the ideal
delay change the magnitude plot.
Therefore, the systems will oscillate at 1.05 rad/sec.
The frequency in Hertz is therefore ![]() . The period is thus
5.984 s. The step response of each of the marginally stable delayed systems are
shown below, and thus the oscillation frequency stands verified, as the period
is clearly about 6 seconds.
. The period is thus
5.984 s. The step response of each of the marginally stable delayed systems are
shown below, and thus the oscillation frequency stands verified, as the period
is clearly about 6 seconds.
1st
and 2nd Order Pade Approximations:
Ideal
time delay case:
d)
i.
Bode and Nyquist plots for system ![]() .
.

ii. ![]()
This
system is necessarily unstable because the time delay decreases phase, and the
original transfer function was already marginally stable with a constant -180
degrees phase.
iii. A PD controller increases phase, and therefore can potentially
stabilize the system. The same is true
for the lead controller. It might be
difficult to find a controller to stabilize the time delayed system because the
phase drops off so quickly. The system
without the time delay should be very straightforward to control with a PD or
lead controller.